

How Does Triangle Inequality Change Tsp Problem
![]() Open up admission peer-reviewed chapter
Open up admission peer-reviewed chapter
How to Solve the Traveling Salesman Problem
Submitted: September 23rd, 2020 Reviewed: January 20th, 2021 Published: February 9th, 2021
DOI: ten.5772/intechopen.96129

IntechOpen Downloads
393
Full Chapter Downloads on intechopen.com
Abstract
The Traveling Salesman Problem (TSP) is believed to be an intractable problem and have no practically efficient algorithm to solve it. The intrinsic difficulty of the TSP is associated with the combinatorial explosion of potential solutions in the solution space. When a TSP instance is big, the number of possible solutions in the solution space is so large equally to forbid an exhaustive search for the optimal solutions. The seemingly "limitless" increase of computational power will non resolve its genuine intractability. Do we demand to explore all the possibilities in the solution space to notice the optimal solutions? This chapter offers a novel perspective trying to overcome the combinatorial complexity of the TSP. When we pattern an algorithm to solve an optimization problem, we usually enquire the critical question: "How tin can we discover all exact optimal solutions and how do nosotros know that they are optimal in the solution infinite?" This chapter introduces the Attractor-Based Search System (ABSS) that is specifically designed for the TSP. This affiliate explains how the ABSS answer this critical question. The calculating complexity of the ABSS is also discussed.
Keywords
- combinatorial optimization
- global optimization
- heuristic local search
- computational complication
- traveling salesman problem
- multimodal optimization
- dynamical systems
- attractor
*Address all correspondence to: weli@umich.edu
i. Introduction
The TSP is one of the nearly intensively investigated optimization bug and oft treated as the prototypical combinatorial optimization trouble that has provided much motivation for design of new search algorithms, development of complexity theory, and analysis of solution space and search space [1, 2]. The TSP is defined as a complete graph
E1
Under this definition, the salesman wants to know what all best alternative tours are available. Finding all optimal solutions is the essential requirement for an optimization search algorithm. In practice, cognition of multiple optimal solutions is extremely helpful, providing the decision-maker with multiple options, particularly when the sensitivity of the objective function to pocket-size changes in its variables may be different at the alternative optimal points. Manifestly, this TSP definition is elegantly elementary only full of claiming to the optimization researchers and practitioners.
Optimization has been a fundamental tool in all scientific and engineering areas. The goal of optimization is to find the all-time set of the admissible conditions to accomplish our objective in our decision-making process. Therefore, the fundamental requirement for an optimization search algorithm is to find
The TSP is known to be NP-hard [2, 3]. The problems in NP-difficult class are said to be intractable because these bug have no asymptotically efficient algorithm, fifty-fifty the seemingly "limitless" increase of computational power will not resolve their genuine intractability. The intrinsic difficulty of the TSP is that the solution space increases exponentially every bit the trouble size increases, which makes the exhaustive search infeasible. When a TSP example is big, the number of possible tours in the solution space is so big to forbid an exhaustive search for the optimal tours. A viable search algorithm for the TSP is one that comes with a guarantee to find all best tours in time at most proportional to
Do we demand to explore all the possibilities in the solution space to find the optimal solutions? Imagine that searching for the optimal solution in the solution space is similar treasure hunting. We are trying to hunt for a hidden treasure in the whole globe. If we are "blindfolded" without any guidance, information technology is a silly idea to search every single square inch of the extremely large space. Nosotros may take to perform a random search procedure, which is usually non effective. However, if nosotros are able to use various clues to locate the pocket-sized village where the treasure was placed, we will then directly go to that village and search every corner of the hamlet to find the hidden treasure. The philosophy backside this treasure-hunting case for optimization is that: if we practice not know where the optimal signal is in the solution infinite, nosotros tin can attempt to identify the small region that contains the optimal point and then search that small-scale region thoroughly to notice that optimal point.
Optimization researchers take developed many optimization algorithms to solve the TSP. Deterministic approaches such equally exhaustive enumeration and branch-and-jump can find verbal optimal solutions, but they are very expensive from the computational point of view. Stochastic optimization algorithms, such as simple heuristic local search, Evolutionary Algorithms, Particle Swarm Optimization and many other metaheuristics, tin find hopefully a good solution to the TSP [ane, four, 5, six, seven]. The stochastic search algorithms merchandise in guaranteed definiteness of the optimal solution for a shorter computing fourth dimension. In practice, virtually stochastic search algorithms are based on the heuristic local search technique [eight]. Heuristics are functions that help us decide which ane of a ready of possible solutions is to be selected next [9]. A local search algorithm iteratively explores the neighborhoods of solutions trying to improve the current solution past a local change. However, the scope of local search is limited by the neighborhood definition. Therefore, heuristic local search algorithms are locally convergent. The final solution may deviate from the optimal solution. Such a final solution is called a
This chapter studies the TSP from a novel perspective and presents a new search algorithm for the TSP. This affiliate is organized in the following sections. Section 2 presents the ABSS algorithm for the TSP. Section three describes the important data construction that is a critical player in solving the TSP. Section 4 discusses the nature of heuristic local search algorithm and introduces the concept of solution attractor. Section 5 describes the global optimization features of the ABSS. Section 6 discusses the computational complexity of the ABSS. Section 7 concludes this affiliate.
Advertizement
2. The attractor-based search organisation for the TSP
Figure one presents the Attractor-Based Search Organization (ABSS) for the TSP. In this algorithm,
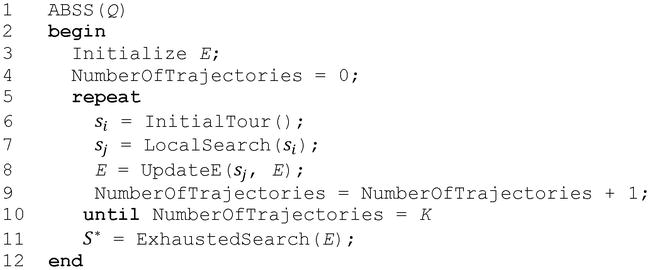
Figure 1.
The ABSS algorithm for the TSP.
Figure 2 uses a 10-node instance as an example to illustrate how the ABSS works. We randomly generate
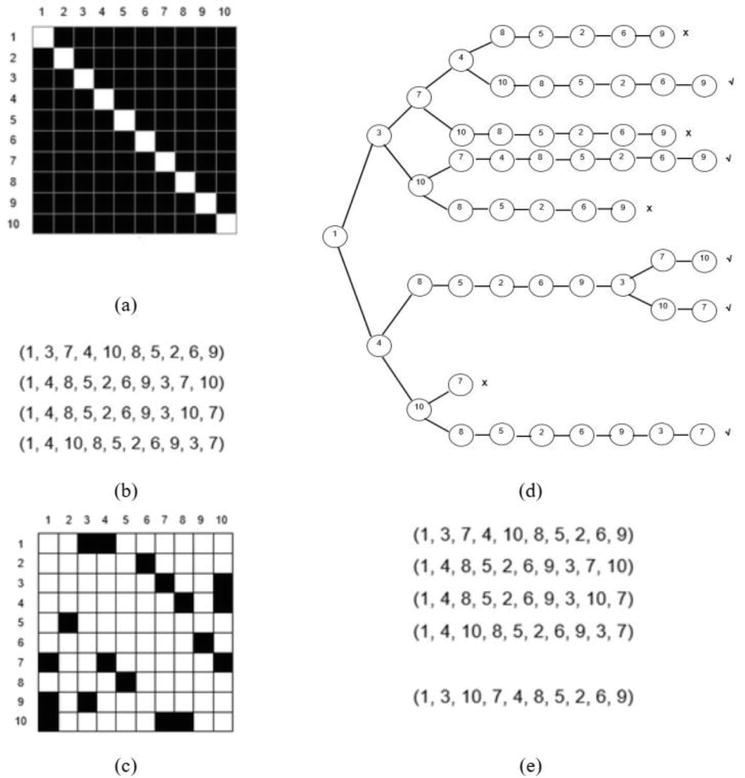
Figure 2.
A simple instance of the ABSS algorithm. (a) Matrimony of the edge configurations of lx random initial tours, (b) four distinct locally optimal tours, (c) union of the edge configurations of the 60 locally optimal tours, (d) the depth-kickoff tree search on the edge configuration of
In all experiments mentioned in the affiliate, we generate symmetric TSP instances with
Advertising
3. The border matrix E
Unremarkably the edge matrix
To solve a trouble, the offset pace is to create a manipulatable description of the trouble itself. For many issues, the pick of data structure for representing a solution plays a critical role in the assay of search beliefs and design of new search algorithm. For the TSP, a tour tin exist represented past an ordered list of nodes or an edge configuration of a tour in the edge matrix
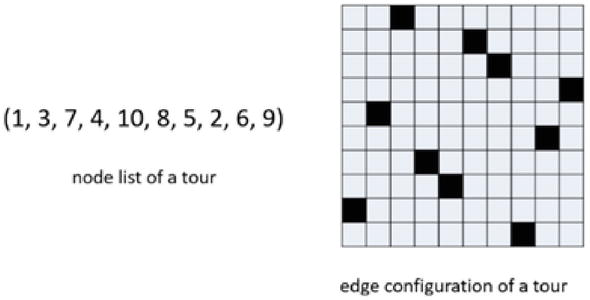
Figure three.
Two representations of a tour: an ordered list of nodes and an border configuration of a bout.
Observing the behavior of search trajectories in a local search organization can be quite challenging. The edge matrix
The changes of the edge configuration of the matrix
E2
Then the hit-frequency value
When
Effigy 4 illustrates a simple example of visualization showing the convergent behavior of 100 search trajectories for a l-node case. Effigy iv(a) shows the epitome of the edge configurations of 100 random initial tours. Since each element of
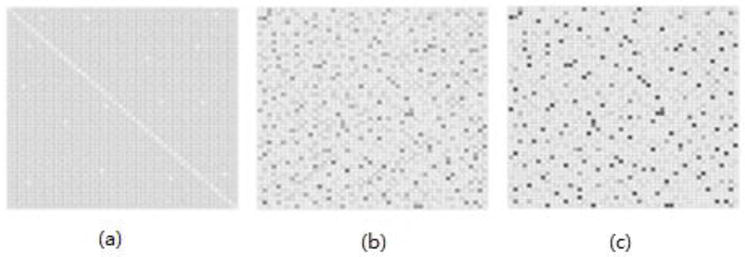
Effigy four.
Visualization of the convergent dynamics of local search system. (a) the paradigm of the edge configurations of 100 initial tours, (b) and (c) the images of edge configurations when the search trajectories are at 2000th and 5000th iteration, respectively.
This simple example has smashing explanatory power about the global dynamics of the local search system for the TSP. As search trajectories continue searching, the number of edges hitting past them becomes smaller and smaller, and better edges are hit by more and more than search trajectories. This edge-convergence miracle means that all search trajectories are moving closer and closer to each other, and their edge configurations get increasingly similar. This phenomenon describes the globally asymptotic behavior of the local search arrangement.
Information technology is easily verified that under sure conditons, a local search system is able to notice the fix of the globally optimal tours
However, the required search attempt may be very huge – equivalent to enumerating all tours in the solution infinite. Now 1 question for the ABSS is "How many search trajectories in the search organization practice we need to find all globally optimal tours?" The matrix
Advertisement
four. The nature of heuristic local search
Heuristic local search is based on the concept of neighborhood search. A neighborhood of a solution
The behavior of a local search trajectory can be understood as a process of iterating a search role
E6
Therefore, a search trajectory will reach an terminate point (a locally optimal betoken) and will stays at this bespeak forever.
In a heuristic local search algorithm, there is a great variety of ways to construct initial bout, cull candidate moves, and define criteria for accepting candidate moves. About heuristic local search algorithms are based on randomization. In this sense, a heuristic local search algoorithm is a randomized organisation. There are no 2 search trajectories that are exactly alike in such a search arrangement. Different search trajectories explore different regions of the solution space and stop at different terminal points. Therefore, local optimality depends on the initial points, the neighborhood role, randomness in the search process, and time spent on search process. On the other hand, however, a local search algorithm essentially is deterministic and not random in nature. If we observe the motion of all search trajectories, we volition come across that the search trajectories become towards the same direction, move closer to each other, and eventually converge into a small-scale region in the solution infinite.
Heuristic local search algorithms are essentially in the domain of dynamical systems. A heuristic local search algorithm is a discrete dynamical system, which has a solution infinite
The attractor theory of dynamical systems is a natural paradigm that can be used to describe the search behavior of a heuristic local search system. The theory of dynamical systems is an extremely broad surface area of written report. A dynamical organization is a model of describing the temporal evolution of a system in its state space. The goal of dynamical system assay is to capture the distinctive properties of certain points or regions in the state space of a given dynamical system. The theory of dynamical systems has discovered that many dynamical systems exhibt attracting behavior in the land space [fourteen, fifteen, xvi, 17, 18, 19, 20, 21, 22]. In such a arrangement, all initial states tend to evolve towards a single concluding point or a set of points. The term
In a local search organisation for the TSP, no matter where we start a search trajectory in the solution space, all search trajectories will converge to a small region in the solution space for a unimodal TSP example or
The concept of solution attractor of local search organization describes where the search trajectories actually go and where their final points actually stay in the solution space. Figure 5 visually summarizes the concepts of search trajectories and solution attractors in a local search system for a multimodal optimization problem, describing how search trajectories converge and how solution attractors are formed. In summary, let
-
Convexity , i.e.t ; -
Centrality , i.e. the globally optimal tour -
Invariance , i.east.t ; -
Inreducibility , i.e. the solution attractorA contains a limit number of invariant locally optimal tours.
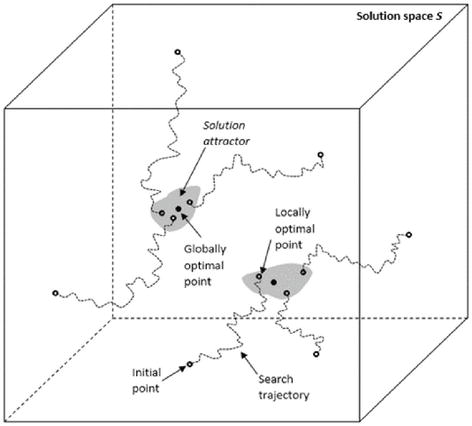
Figure 5.
Analogy of the concepts of serch trajectories and solution attractors in a local search system for a multimodal optimization problem.
A search trajectory in a local search system changes its edge configuration during the search according to the objective function
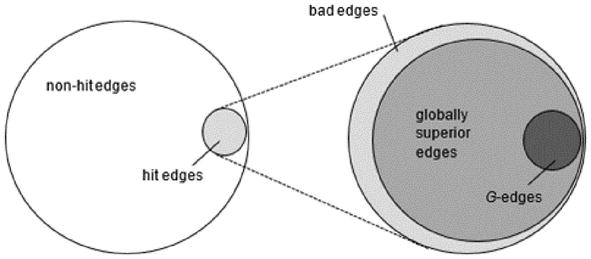
Figure 6.
The group of the edges in
In the ABSS, we use
The convergence of the search trajectories tin be measured by the change in the edge configuration of the matrix
For a given TSP instance,
E8
Our experiments confirmed this inference most
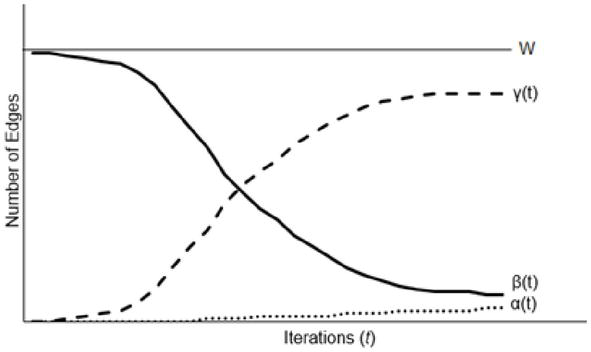
Effigy 7.
The
In summary, we assume a TSP instance
-
Information technology contains all locally optimal tours;
-
Information technology contains a complete collection of solution attractors, i.due east.
-
It contains a consummate collection of
G -edges, i.e.
From this analysis, nosotros can meet that the edge matrix
Advertisement
5. Global optimization characteristic of the ABSS
The chore of a global optimization arrangement is to discover all admittedly best solutions in the solution space. There are two major tasks performed by a global optimization system: (ane) finding all globally optimal points in the solution space and (two) making certain that they are globally optimal. So far we exercise not have any constructive and efficient global search algorithm to solve NP-hard combinatorial issues. We practise not even have well-developed theory or assay tool to assistance us design efficient algorithms to perform these two tasks. One critical question in global optimization is how to recognize the globally optimal solutions. Modern search algorithms lack applied criteria that decides when a locally optimal solution is a globally optimal ane. What is the necessary and sufficient condition for a feasible point
-
The search organisation should be globally convergent.
-
The search system should be deterministic and have a rigorous guarantee for finding all globally optimal solutions without excessive computational burden.
-
The optimality benchmark in the arrangement must exist based on information on the global behavior of the search system.
The ABSS combines beautifully two crucial aspects in search: exploration and exploitation. In the local search phase,
Each of the
E9
That is, the solution attractor
We see that the matrix
and
The "convexity" property of the solution attractor
Therefore the global convergence and deterministic property of the search trajectories in the local search phase make the ABSS always find the same prepare of globally optimal tours. We conducted several experiments to ostend this argument empirically. In our experiments, for a given TSP instance, the ABSS performed the same search process on the instance several times, each fourth dimension using a unlike set of
Table one shows the results of two experiments. One experiment generated
| Trial number | Number of tours in | Range of tour cost | Number of best tours in |
|---|---|---|---|
| | |||
| ane | 6475824 | [3241, 4236] | 1 |
| ii | 6509386 | [3241, 3986] | 1 |
| 3 | 6395678 | [3241, 4027] | one |
| 4 | 6477859 | [3241, 4123] | 1 |
| 5 | 6456239 | [3241, 3980] | 1 |
| 6 | 6457298 | [3241, 3892] | 1 |
| seven | 6399867 | [3241, 4025] | one |
| 8 | 6423189 | [3241, 3924] | 1 |
| 9 | 6500086 | [3241, 3948] | 1 |
| 10 | 6423181 | [3241, 3867] | 1 |
| | |||
| 1 | 8645248 | [69718, 87623] | 4 |
| ii | 8657129 | [69718, 86453] | 4 |
| iii | 8603242 | [69718, 86875] | 4 |
| 4 | 8625449 | [69718, 87053] | 4 |
| v | 8621594 | [69718, 87129] | four |
| half-dozen | 8650429 | [69718, 86978] | 4 |
| seven | 8624950 | [69718, 86933] | 4 |
| eight | 8679949 | [69718, 86984] | iv |
| 9 | 8679824 | [69718, 87044] | iv |
| 10 | 8677249 | [69718, 87127] | four |
Table 1.
Tours in constructed solution attractor
Advertisement
6. Computing complexity of the ABSS
With current search applied science, the TSP is an infeasible problem because it is not solvable in a reasonable corporeality of time. Faster computers will not help. A feasible search algorithm for the TSP is one that comes with a guarantee to find all best tours in time at almost proportional to
The cadre idea of the ABSS is that, if we have to use exhaustive search to confirm the globally optimal points, we should first detect a fashion to quickly reduce the effective search infinite for the exhaustive search. When a local search trajectory finds a better bout, we can say that the local search trajectory finds some meliorate edges. It is an inclusive view. Nosotros also can say that the local search trajectory discards some bad edges. Information technology is an sectional view. The ABSS uses the sectional strategy to conquer the TSP. The local search phase in the ABSS quickly prunes out large number of edges that cannot perchance be included in any of the globally optimal tours. Thus, a big useless area of the solution infinite is excluded. When the first edge is discarded by all
Now an essential question is naturally raised: What is the human relationship between the size of the constructed solution attractor and the size of the problem instance? Unfortunately, at that place is no theoretical analysis tool bachelor in the literature that tin can be used to answer this question. Nosotros have to depend on empirical results to lend some insights. We conducted several experiments to discover the human relationship between the size of the constructed solution attractor and the TSP instance size. Figures viii–10 show the results of 1 of our experiments. All other like experiments reveal the same design. In this experiment, we generated 10 unimodal TSP instances in the size from k to 10000 nodes with grand-node increase. For each instance, the ABSS generated

Figure 8.
The number of discarded edges at the terminate of local search phase.
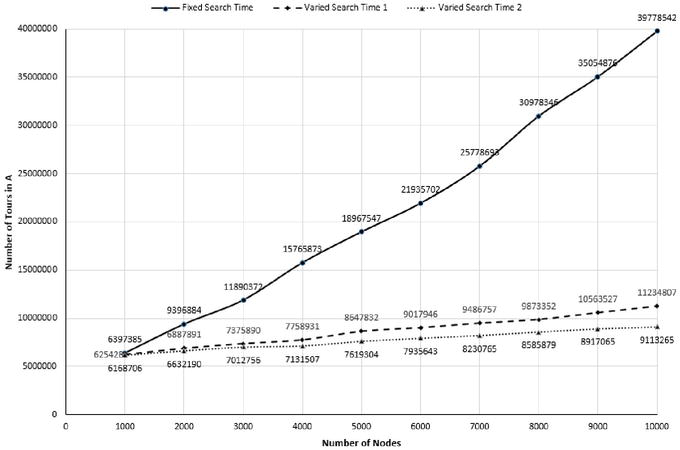
Figure ix.
Human relationship betwixt the size of the constructed solution attractor and instance size.
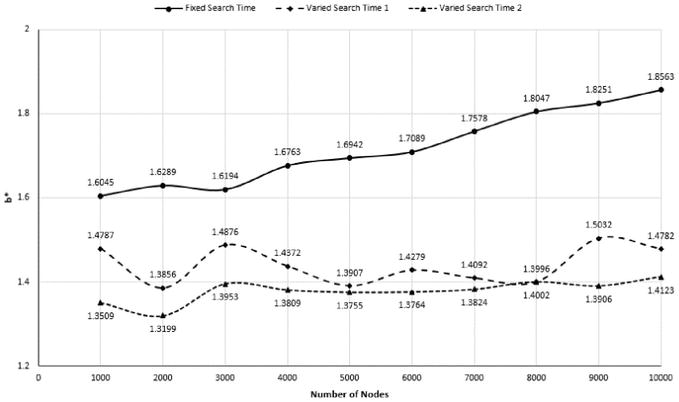
Figure 10.
The
In Figure 8, we can see that the search trajectories tin can speedily converge to a small set of edges. In the fixed-search-time example, about threescore% of the edges were discarded by search trajectories for the 1000-node case, but this percentage decreases equally instance size increases. For the 10000-node instance, just nigh 46% of the edges are discarded. However, if we increase the local search time linearly when the instance size increases, we can keep the aforementioned percentage of discarded-border for all instance sizes. In the varied-search-fourth dimension-1 case, about 60% of the edges are abandoned for all different instance sizes. In the varied-search-time-2 example, this percentage increases to 68% for all instances. College percentage of abandoned edges means that majority of the branches are removed from the search tree.
Figure 9 shows the number of tours be in the constructed solution attractor for these instances. All curves in the chart announced to exist linear relationship between the size of constructed solution attractor and the size of the problem instance, and the varied-search-time curves have much flatter slope because longer local search time makes a smaller constructed solution attractor. Figures 8 and 9 indicate that the search trajectories in the local search stage can effectively and efficiently reduce the search space for the exhaustive search, and the size of the solution attractor increases linearly as the size of the problem instance increases. Therefore, the local search phase in the ABSS is an efficiently asymptotical search process that produces an extremely modest search space for further exhaustive search.
The completely searching of the constructed solution attractor is delegated to the exhaustive search stage. This phase may still need to examine tens or hundreds of millions of tours simply nothing a computer processor cannot handle, equally opposed to the huge number of full possibilities in the solution infinite. The exhaustive search phase tin can find the exact globally optimal tours for the problem instance after a express number of search steps.
The exhaustive search phase can use any enumerative technique. Nevertheless, the border configuration of
where
Therefore, the ABSS is a uncomplicated algorithm that increases in computational difficulty polynomially with the size of the TSP. In the ABSS, the objective pursued by the local search phase is "chop-chop eliminating unnecessary search space every bit much every bit possible." It tin can provide an respond to the question "In which pocket-sized region of the solution infinite is the optimal solution located?" in time of
Advertisement
7. Conclusion
Advances in computational techniques on the decision of the global optimum for an optimization problem can have great impact on many scientific and engineering fields. Although both the TSP and heuristic local search algorithms have huge literature, there is still a variety of open problems. Numerous experts have made huge advance on the TSP inquiry, but two fundamental questions of the TSP remain essentially open: "How can we find the optimal tours in the solution space, and how practise we know they are optimal?"
The P-vs-NP problem is about how fast we tin search through a huge number of solutions in the solution infinite [34]. Exercise we ever need to explore all the possibilities of the problem to discover the optimal one? Really, the P-vs-NP trouble asks whether, in general, nosotros can find a method that completely searches only the region where the optimal points are located [34, 35, 36]. About people believe
The ABSS is designed for the TSP. Even so, the concepts and formulation behind the search algorithm can be used for any combinatorial optimization problem requiring the search of a node permutation in a graph.
References
- 1.
Applegate DL, Bixby RE, Chaátal 5, Cook WJ. The Traveling Salesman Problem: A Computational Study. Princeton: Princeton Academy Press; 2006 - two.
Papadimitriou CH, Steiglitz One thousand. Combinatorial Optimization: Algorithms and Complexity. New York: Dover Publications; 1998 - iii.
Papadimitriou CH, Steiglitz K. On the complication of local search for the traveling salesman trouble. SIAM Journal on Calculating. 1977:vi:76–83 - 4.
Gomey J. Stochastic global optimization algorithms: a systematic formal approach. Computer science. 2019:472:53–76 - v.
Korte B, Vygen J. Combinatorial Optimization: Theory and Algorithms. New York: Springer; 2007 - 6.
Rego C, Gamboa D, Glover F, Osterman C. Traveling salesman problem heuristics: leading methods, implementations and latest advances. European Journal of Operational Inquiry. 2011:211:427–411 - 7.
Zhigliavsky A, Zillinakas A. Stochastic Global Optimization. New York: Springer; 2008 - 8.
Aart E, Lenstra JK. Local Search in Combinatorial Optimization. Princeton: Princeton Academy Press; 2003 - 9.
Michalewicz Z, Fogel DB. How to Solve It: Modern Heuristics. Berlin: Springer; 2002 - 10.
Sahni S, Gonzales T. P-complete approximation problem. Journal of the ACM. 1976:23:555–565 - 11.
Sourlas N. Statistical mechanics and the traveling salesman problem. Europhysics Letters. 1986:2:919–923 - 12.
Savage SL. Some theoretical implications of local optimality. Mathematical Programming. 1976:10:354–366 - 13.
Shammon CE. A mathematical theory of communication. Bong System Technical Journal. 1948:27:379–423&623–656 - 14.
Alligood KT, Sauer TD, York JA. Anarchy: Introduction to Dynamical System. New York: Springer; 1997 - xv.
Auslander J, Bhatia NP, Seibert P. Attractors in dynamical systems. NASA Technical Report NASA-CR-59858; 1964 - sixteen.
Brin M, Stuck Grand. Introduction to Dynamical Systems. Cambridge: Cambridge University Printing - 17.
Brown R. A Mod Introduction to Dynamical Systems. New York: Oxford Academy Press - xviii.
Denes A, Makey K. Attractors and footing of dynamical systems. Electronic Journal of Qualitative Theory of Differential Equations. 2011:xx(20):one–eleven - 19.
Fogedby H. On the phase space approach to complication. Periodical of Statistical Physics. 1992:69:411–425 - xx.
Milnor J. On the concept of attractor. Communications in Mathematical Physics. 1985:99(ii):177–195 - 21.
Milnor J. Collected Papers of John Milnor VI: Dynamical Systems (1953–2000). American Mathematical Society; 2010 - 22.
Ruelle D. Pocket-size random perturbations of dynamical systems and the definition of attractor. Communications in Mathematical Physics. 1981:82:137–151 - 23.
Li W. Dynamics of local search trajectory in traveling salesman problem. Journal of Heuristics. 2005:11:507–524 - 24.
Li W, Feng M. Solution attractor of local search in traveling salesman trouble: concepts, structure and application. International Journal of Metaheuristics. 2013:2(3):201–233 - 25.
Li Westward, Li X. Solution attractor of local search in traveling salesman problem: computational written report. International Periodical of Metaheuristics. 2019:7(2):93–126 - 26.
Kroese DP, Taimre T, Botev ZI. Handbook of Monte Carlo Methods. New York: John Wiley & Sons; 2011 - 27.
Fischer ST. A note on the complication of local search problems. Information Processing Letters. 1995:53(ii):69–75 - 28.
Chandra B, Karloff HJ, Tovey CA. New results on the old-opt algorithm for the traveling salesman problem. SIAM Periodical on Computing. 1999:28(6):1998–2029 - 29.
Grover, LK. Local search and the local construction of NP-complete problems. Operations Inquiry Messages. 1992:12(4):235–243 - xxx.
Baudet GM. On the branching factor of the alpha-beta pruning algorithm. Artificial Intelligence. 1978:10(23):173–199 - 31.
Edelkamp S, Korf RE. The branching factor of regular search space. Proceedings of the xvth National Conference on Artificial Intelligence. 1998:292–304 - 32.
Korf RE. Depth-start iterative deepening: an optimal admissible tree search. Artificial Intelligence. 1985:27:97–109 - 33.
Pearl J. The solution for the branching gene of the alpha-beta pruning algorithm and its optimality. Advice of the ACM. 1982:25(eight):559–564 - 34.
Fortnow L. The Gilt Ticket – P, NP, and the Search for the Impossible. Princeton: Princeton University Press; 2013 - 35.
Fortnow L. The status of the P versus NP problem. Communication of the ACM. 2009:52(nine):78–86 - 36.
Sipser M. The history of status of the P verses NP question. Proceedings of 24th Annual ACM Symposium on Theory of Computing. 1992:603–618
Submitted: September 23rd, 2020 Reviewed: Jan 20th, 2021 Published: February ninth, 2021
© 2021 The Author(due south). Licensee IntechOpen. This chapter is distributed under the terms of the Artistic Eatables Attribution 3.0 License, which permits unrestricted utilize, distribution, and reproduction in whatever medium, provided the original work is properly cited.

Source: https://www.intechopen.com/chapters/75156
Posted by: pageothessonce.blogspot.com
0 Response to "How Does Triangle Inequality Change Tsp Problem"
Post a Comment